
 5
5






- 입력 2024.12.24 16:34


 0
0[ 아시아경제 ] 김의겸 아주대 교수팀이 전방위 물체 조작이 가능한 고성능 로봇 손을 개발했다.
24일 아주대에 따르면 김의겸 교수팀이 다양한 방식으로 물체를 쥐거나 조작할 수 있는 고성능 로봇 그리퍼(Robot Gripper)와 정밀한 접촉력 측정이 가능한 촉각센서를 개발했다고 밝혔다.
해당 연구는 '전방위 물체 조작이 가능한 다자유도 산업용 로봇 그리퍼'라는 제목으로 12월호에 게재됐다. 그리퍼 촉각센서에 대한 내용은 ‘정밀한 접촉력 측정이 가능한 손가락 끝 촉각 센서’라는 제목으로 10월호에 실렸다.
이번 연구에는 김의겸 아주대 기계공학과 교수가 교신저자로, 이유성·박정화 학생(석박사 통합과정)이 제1저자로 참여했다. 두 논문의 공동 교신저자로는 한국기계연구원의 박동일 박사와 최정일 아주대 기계공학과 교수가 함께 했다.
3지 형태의 로봇 손인 로봇 그리퍼(Robot Gripper)는 그동안 잡거나 놓는 수준의 작업만을 수행할 수 있었다. 신뢰할 수 있는 제어성과 견고함을 확보하기 위해 제한적으로 설계해야 하기 때문이다.
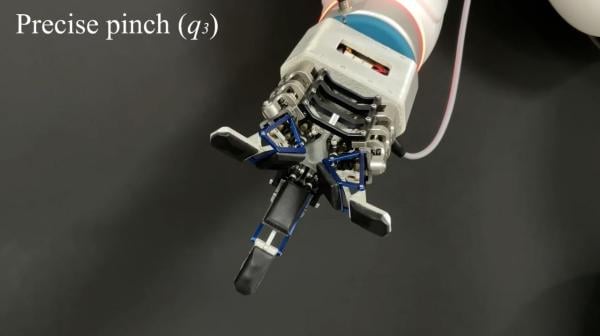
아주대 연구팀은 이 같은 제어성과 견고함을 유지하면서도 평행 잡기, 정밀 잡기, 감싸 잡기와 같이 다양하게 물건을 쥘 수 있는 기능을 구현해 내는 데 성공했다. 더 나아가 물체의 방위를 손안에서 변경하거나 공구를 조작하는 기능까지 가능한 로봇 손을 개발했다.
연구팀은 이를 위해 병렬 및 직렬 구조 기반의 새로운 링크 메커니즘을 개발, 기존에 개발된 메커니즘보다 높은 구동 자유도를 확보했다. 또 견고한 구동계 및 구조 설계를 통해 높은 파지력을 확보했다.
아주대 연구팀은 더불어 로봇 손끝에 결합할 수 있는 그리퍼 끝단 센서를 개발했다. 이 센서를 활용하면 물체가 어떻게 잡히고 조작되는지를 실시간으로 모니터링할 수 있다. 이 센서는 로봇과의 결합이 용이하고, 높은 공간 해상도(0.1mm 이하)와 분포 하중 측정 기능을 포함하고 있다.
이러한 특징은 센서가 정확하게 접촉력을 측정하고, 로봇이 섬세하게 조작할 수 있도록 제어하는 데 도움을 준다. 연구팀은 높은 공간 해상도를 확보할 수 있는 보정 알고리즘을 센서에 적용, 해당 기술을 개발할 수 있었다.
김 교수는 "인간의 손 모양을 본떠 만든 인간형 로봇손은 특수한 제어방법론이 필요해 아직 산업 현장에서 직접 활용하기가 어려운 상황"이라며 "이번에 개발한 다자유도 그리퍼는 작업 범위가 매우 넓고 명확한 기능성을 가지고 있어 로봇 신산업 개척에 중요한 의미를 가진다"고 전했다.
이번 연구는 산업통상자원부 로봇산업핵심기술개발사업과 한국연구재단 우수신진연구사업의 지원을 받아 수행됐다. 김의겸 교수팀은 고성능 그리퍼 기술과 로봇용 촉각 센서 기술을 꾸준히 연구해 나갈 계획이다.
박준이 기자 giver@asiae.co.kr<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>
- #아주
- #제어
- #고성
- #개발
- #리퍼
- #센서
- #조작
- #로봇
- #교수
- #물체

- 기뻐요
- 0

- 응원해요
- 0

- 실망이에요
- 0

- 슬퍼요
- 0
- 1
- 김동연, 3월 도정회의서 "탄핵 정국에 민생 숨넘어 갈 지경…경기도부터 시작할 것"
- 아시아경제
 0
0

- 2
- 서울시, 탄핵 선고 전후 '시민안전대책본부' 가동… 안전관리 총력
- 아시아경제
- 0

- 3
- 광주서 탄핵 촉구 피켓 시위중 쓰러져···60대 사망
- 서울신문
- 0

- 4
- 양주 軍비행장에서 드론 헬기 충돌…인명피해 없어
- 서울신문
- 0

- 5
- 제주 ‘동백꽃’ 유명 관광지, 임야 불법 훼손 혐의 40대 운영자 기소
- 서울신문
- 0

- 6
- 신상진 시장 "어르신 복지·건강한 노후생활 지원 최선 다하겠다"
- 아시아경제
- 0

- 7
- 오산시, '원어민 화상영어교육 프로그램' 참가자 모집
- 아시아경제
- 0

- 8
- 화성시, 사회적경제 기업 대상 맞춤형 컨설팅 지원
- 아시아경제
- 0
- 9
- 광진구, 전국 최초 ‘공인중개사 MBTI 기반 맞춤형 서비스’ 운영
- 아시아경제
- 0

- 10
- '서부지법 난동'에 평생교육시설 교사도 있었다 "징계 진행 중"
- 아시아경제
- 0

- 최신뉴스
- 인기뉴스
- 뉴스
- 투표
- 게임
- 이벤트

최신순
추천순
답글순

등록된 댓글이 없습니다.